Hned na úvod mám malé upozornění – název tohoto článku není úplně přesný. Kdybych ho ale nazval
"H-můstek" nebo "Realizace zapojení H-můstku pomocí dvojice relé", mnohé čtenáře by nemuselo napadnout, k čemu je takové zapojení vlastně dobré. Lepší název by byl třeba: "Jak Arduino donutit, aby přepólovalo přívody u libovolného zařízení, které je napájeno ze stejnosměrného zdroje napětí?"
Mimochodem, změna polarity se může hodit nejen u standardních DC motorů, kde dojde ke změně směru otáčení, ale třeba také u bistabilních ventilů nebo solenoidových lineárních aktuátorů. Určitě by se daly vymyslet i další aplikace...
Tak co je to ten H-můstek?
Pokud někoho zajímá, proč se tomuto zapojení říká H-můstek, nechť se znovu podívá na schéma.
Nápověda: Spínací prvky a motor jsou ve schématu uspořádány do tvaru jednoho písmene naší abecedy ;)
Obrázek 1: Schéma zapojení H-můstku

Super. Ale jak ten můstek funguje?
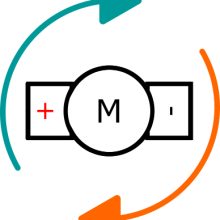
Podle toho, které spínače jsou sepnuté a které rozepnuté, můžeme dostat čtyři stavy – rozpojený obvod, zkrat, průchod proudu zařízením v jednom směru a průchod proudu zařízením v opačném směru. Poslední dva jmenované stavy jsou zobrazeny v Animaci 1. Rozpojený obvod není z pohledu animace zajímavý. Zkrat jsem raději také vynechal, aby někteří horliví experimentátoři zbytečně neusmažili zdroj a další součástky. Situaci všech možných stavů shrnuje tato tabulka (Karnaughova mapa).
Animace 1: H-můstek v akci


<Malá vsuvka>
Animaci, resp. simulaci obvodu jsem vytvořil v praktickém appletu, který je zdarma dostupný na této webové stránce. Applet neobsahuje součástku "motor", tak jsem použil americký rezistor. Pro přiblížení naší problematiky to stačí. Tady sdílím soubor, který můžete do appletu naimportovat a s obvodem si pohrát. No a pokud už sedíte u počítače dlouho, tak šup pro nepájivé pole a bastlit :)
</Malá vsuvka>
OK, ale kde je to Arduino?
Když už máme teorii za sebou, jde se zapojovat. Pozorným čtenářům neuniklo, že já použiju pro realizaci zapojení dvojici relé - konkrétně se jedná o dvoukanálový modul 1500636006.
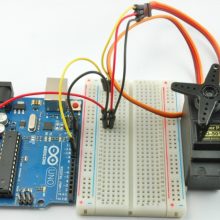
Výsledek si můžete prohlédnout na Obrázku 2. Mohli bychom použít čtyři standardní relé a zapojit je shodně se schématem výše. Pak bychom měli čtyři řídicí signály a každé relé bychom ovládali samostatně. "Moje" zapojení má však jednu nespornou výhodu a hned vám vysvětlím jakou. U varianty "4 relé" se totiž může programátorovi stát, že udělá chybu, sepne špatná relátka a vyrobí zkrat (vizte znovu Karnaughovu mapu). U varianty "2 relé" (která je zapojena správně :) ), zkrat nejde vyrobit, ať se programátor snaží, jak chce. Je to z těchto důvodů:
- Vždy jsou sepnuty právě dva kontakty. Nelze tedy vyrobit tříkontaktový a čtyřkontaktový zkrat.
- Nelze vyrobit ani dvoukontaktový zkrat, protože na modulu jsou relátka se spínací konfigurací SPDT (single pole, double throw). Za domácí úkol si můžete vygooglit, jak takový kontakt vypadá (je to naznačeno i přímo na relé modulu u popisku K1 a K2). Pak zjistíte, že pokud obvodem prochází proud, vždy jde přes zátěž (motorek) a nikdy se nespojí + a – pól zdroje přes dva kontakty napřímo.
Jelikož má programátor k dispozici pouze dva řídicí signály (IN1 a IN2), na kterých je vždy log. 1 nebo log. 0, původní Karnaughova mapa se nám značně zjednoduší, vizte Tabulku 1.
Tabulka 1: Zjednodušená Karnaughova mapa
| IN1 (relé 1) | IN2 (relé 2) | Popis výsledného stavu |
| 1 | 1 | motor se otáčí jedním směrem |
| 1 | 0 | oba kontakty motoru jsou připojeny k zápornému pólu zdroje, motor stojí |
| 0 | 1 | oba kontakty motoru jsou připojeny ke kladnému pólu zdroje, motor stojí |
| 0 | 0 | motor se otáčí druhým směrem |
K Obrázku 2 mám ještě pár poznámek:
- Arduino na obrázku nenajdete. Je to z toho důvodu, že k relé modulu můžete připojit i jiné vývojové platformy a řídicí systémy. Tento konkrétní relé modul používá pro log. 1 úroveň napětí 5 VDC, ale existují samozřejmě i varianty, které jsou určeny pro 3V3 logiku. Zapojíte tedy také např. malinu (Raspberry Pi) nebo ESPčko (vývojové kity s čipem ESP8266) atd.
- Tento konkrétní relé modul má napájecí napětí 12 VDC (vodiče VCC a GND), ale existují samozřejmě i varianty pro jiné napětí.
- V mém příkladu je motorek napájen ze zdroje 3 VDC. Můžete ale samozřejmě zapojit i napěťový zdroj s jiným jmenovitým napětím – podle toho jaký spotřebič připojíte.
Obrázek 2: Realizace zapojení H-můstku pomocí dvojice relé

Na závěr snad jen doplním, že tento článek je spíše takovým úvodem do problematiky, jak H-můstek realizovat a na co ho použít. Asi nejvíce se využívá při řízení krokových motorů, tam však relátka nenajdete. O tom se ale rozepíšu zase někdy jindy...